MINI SEGWAY
A robot that balances and dances to music
April - June 2019.
Group Project with Mark Ridge
A robot that balances and dances to music
April - June 2019.
Group Project with Mark Ridge
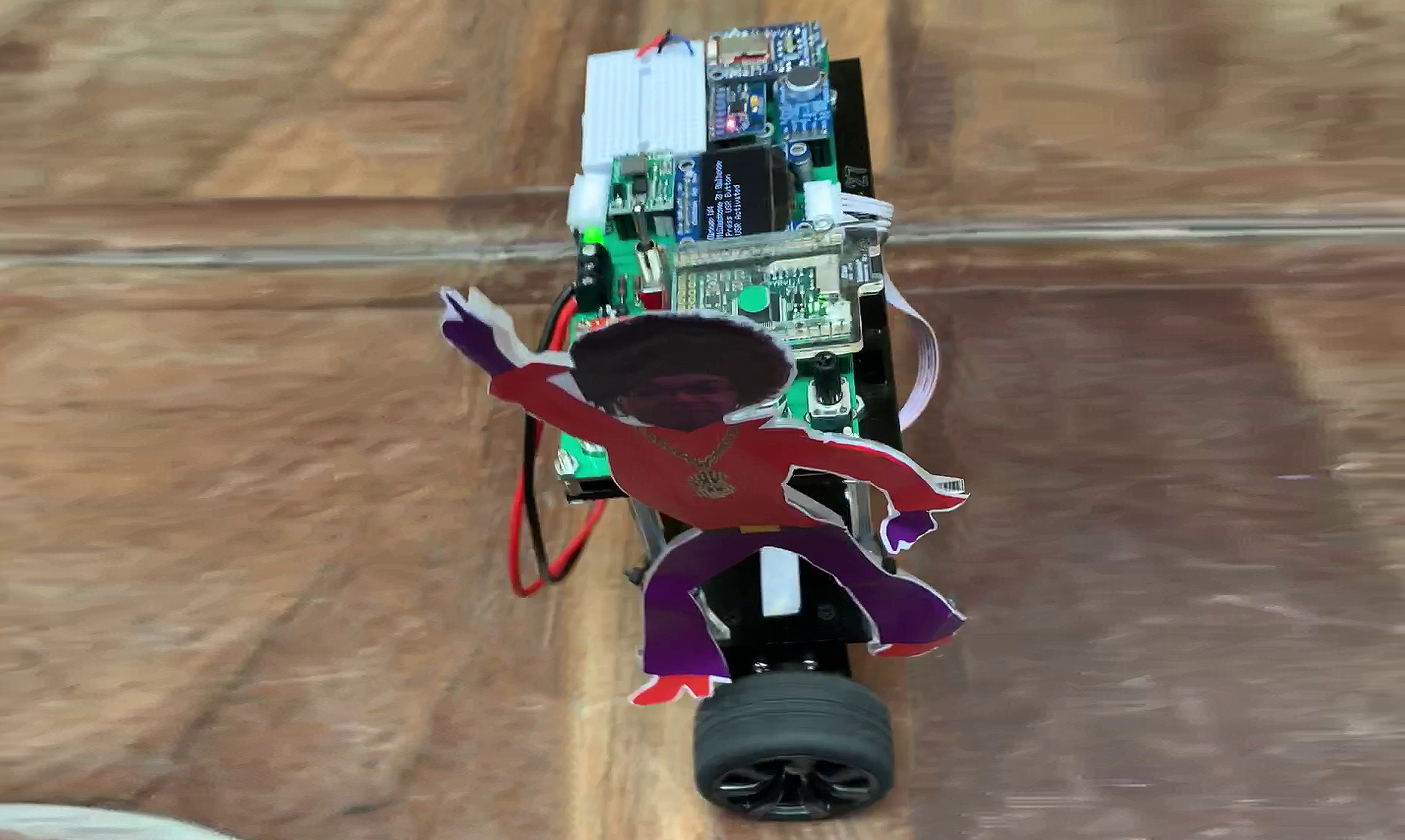
Mini Segway is a two wheeled robot that can 'dance' to music using beat detection, and self-balance.
1. An onboard microphone picks up the energy of a song, and an interrupt routine performs a 'dance' move if a part of the song exceeds an energy threshold.
2. PID Control was used in conjunction to an IMU, a relationship with the PWM signal sent to the motors and output of the IMU ensures the robot is balanced.
3. The PID constants were manually tuned in order to ensure the robot could balance.
4. A complementary filter was used to combine the the outputs of the IMU.
5. Micropython and MATLAB were used as a programming languages.